 Robotics / ML
Robotics / ML
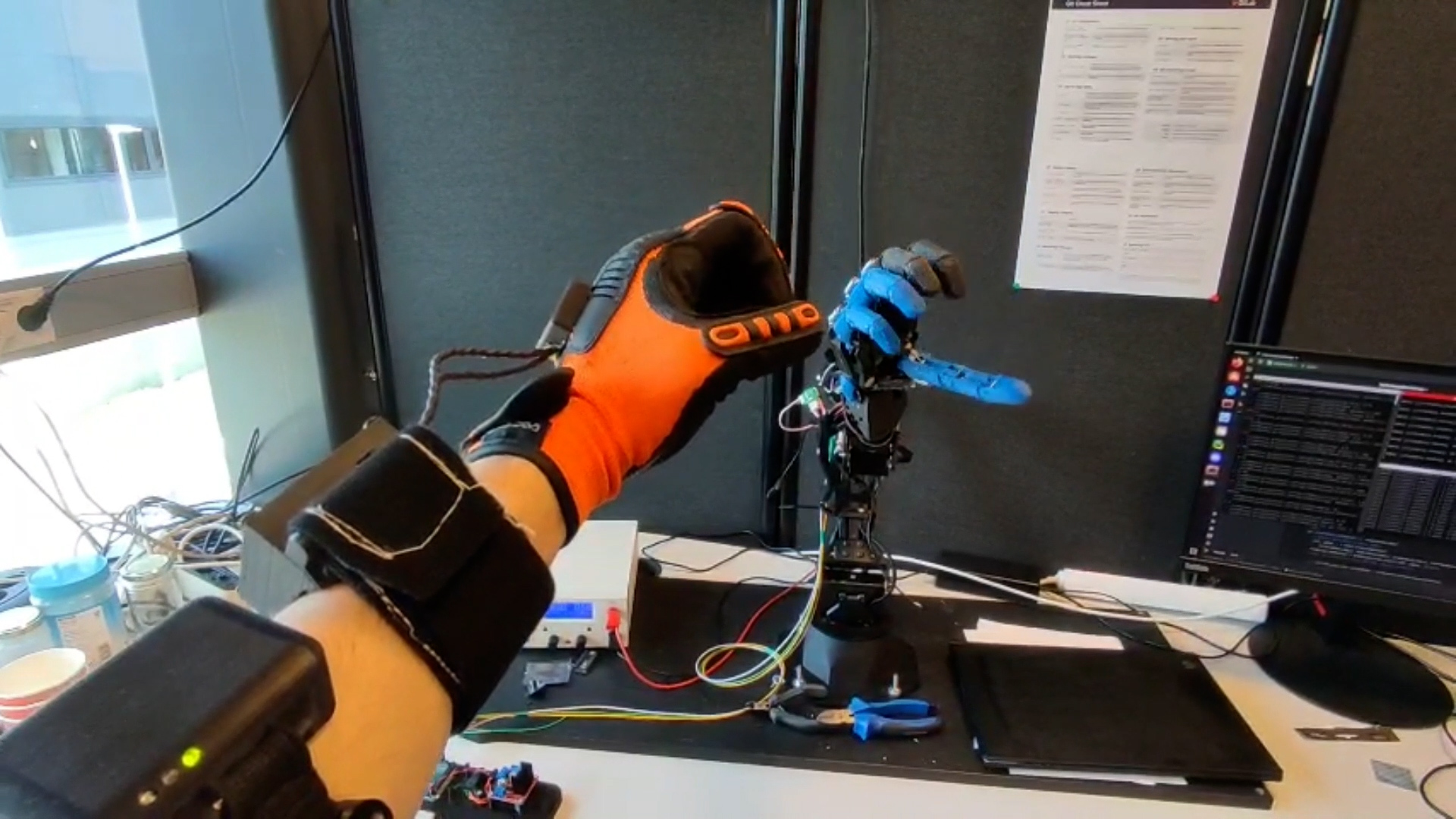
Human–Robot Collaboration
Bachelor group project using real sEMG signals, an MPU9250 IMU, gesture classification and ROS-based robot control with the ViperX-300 platform.
Outcome: Built a working proof-of-concept/demo combining EMG gesture control, IMU orientation control and robot integration.
sEMGMPU9250ROS2ML